
雷达模糊
|
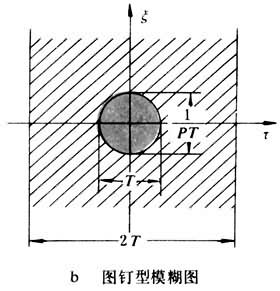
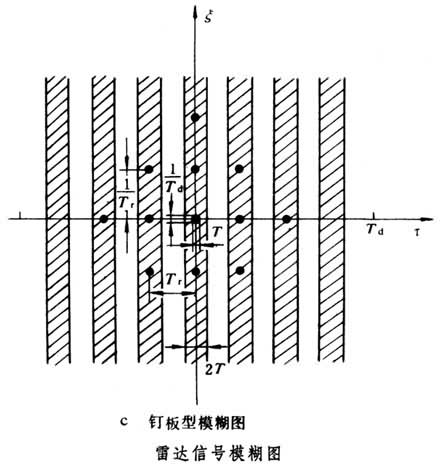
[拼音]:leida mohu [外文]:radar ambiguity 在雷达理论中,模糊与分辨是两个既有联系又有区别的概念(见雷达分辨能力)。对多目标的情况来说,模糊就是不能分辨。雷达名义分辨力取决于模糊图中心主瓣的宽度(图a、b、c)。雷达模糊度不仅考虑主瓣宽度,还考虑模糊图旁瓣的影响。对参数测量来说,模糊是指单一目标参数测定的多值性。 以脉冲多普勒雷达为例,脉冲重复频率选得太高,远距离目标回波时延超过重复周期,这就会出现测距多值性模糊。反之,脉冲重复频率选得太低,高速目标的多普勒频移大于重复频率,又会产生测速多值性模糊。 P.M.伍德沃德采用均方差准则作为最佳分辨准则,定义函数 
为雷达信号模糊函数。式中u(t)表示信号复包络;u*(t)为 u(t)的复共轭函数;τ、 (1)封闭形模糊曲面的顶点在原点,即 |χ(τ, (2)模糊函数对原点对称,即 |χ(-τ,- (3)模糊曲面下的容积取决于信号能量,与信号形式无关,即 
这就是雷达模糊原理。雷达测距和测速精度分别取决于模糊图中心主瓣沿τ和 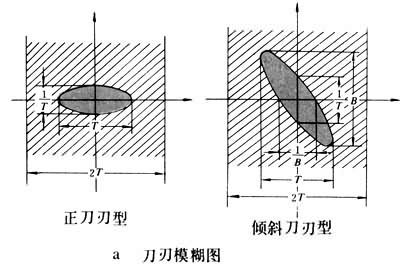
与信号模糊图相似,天线方向图(见天线方向性)表征不同方位、不同仰角目标的空间模糊度,它直接影响空间角的分辨力、精度和测量单值性。
|
 分别为目标回波信号的相对时延和相对多普勒频移。用|χ(τ,
分别为目标回波信号的相对时延和相对多普勒频移。用|χ(τ, 轴向的宽度,主瓣越窄,测量精度越高。分辨力不仅取决于主瓣宽度,还与主瓣周围的旁瓣高度有关。能提供高分辨力的波形也能提供高测量精度;但是,反过来就不一定正确。
轴向的宽度,主瓣越窄,测量精度越高。分辨力不仅取决于主瓣宽度,还与主瓣周围的旁瓣高度有关。能提供高分辨力的波形也能提供高测量精度;但是,反过来就不一定正确。


















