
隔振
|
[拼音]:gezhen [外文]:Vibration isolation 又称振动隔离,在振动源和待隔振系统之间的振动传输通道上加装弹性元件,用以减少振动从振动源传输到待隔振系统的能量。振动隔离通常采用隔振器(具有力劲和阻尼的弹性元件),它可以在宽的频率范围内控制振动,适用于简谐的、周期的、宽带的随机振动等激励情况。隔振器的性能通常可用传递比TA来描述。当振动源是力发生机制时,隔振器的目的是减少传到基础上的力,而在基础上是安装有机器的,在这种情况下,传递比定义为传递力的幅值对激励力的幅值的比。若振动源是基础受到振动运动,隔振器的目的是减少传递给装在机座上的机器的运动的振幅,此时传递比定义为传递运动的振幅对激励运动的振幅的比。传递比与频率的关系曲线见图1。图中ζ 是粘滞阻尼系数与临界阻尼系统中粘滞阻尼系数的比,f是激励力频率,f0是隔振系统的无阻尼共振频率
式中Sm是隔振器力劲,M 是被隔振的物体的质量。由图1中的曲线可以看出:当 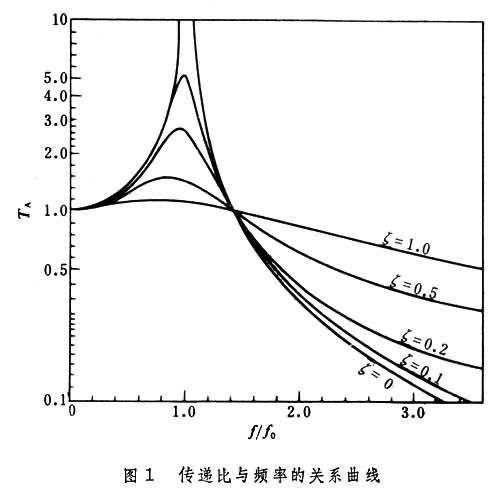
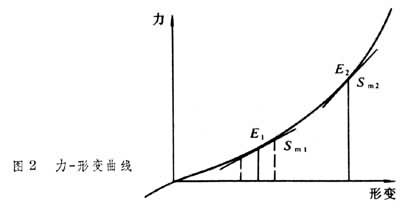
当隔振器承载过大时,它的静态形变增大,例如图2中从E1增加到E2,此时E2处的力劲 Sm2(力劲是力-形变曲线的斜率)大于E1处的力劲Sm1,由于力劲的变化,隔振器的固有频率也随之而变化,这称为隔振器的非线性效应。在使用隔振器时应注意这种问题。 当机器的下面四个角对称位置处用四个隔振器支撑时,如图3所示,这样的系统属于多自由度振动系统。如果通过机器重心的两个平面是对称平面,即图3中xGz平面和yGz平面,则机器在z方向的振动方式是独立的,而α和β振动方式是互相耦合的。如果四个隔振器的力劲相等,则z方向的固有频率为
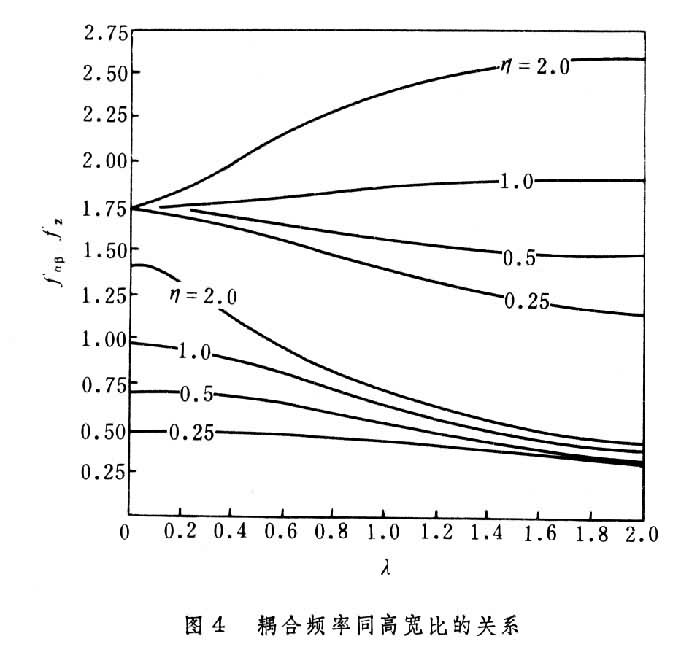
式中M 是隔振器所支撑的物体的质量,S (1)机器是长方形体,而且质量均匀分布; (2)四个隔振器精确地安置在长方形体的四个下角; (3)隔振器的高度可以忽略不计;则α和β振动方式相互耦合的频率 fαβ可用简单的数学式来表示。利用图4可方便地求出耦合频率,图中λ为高宽比,η为损耗因数(见减振)。 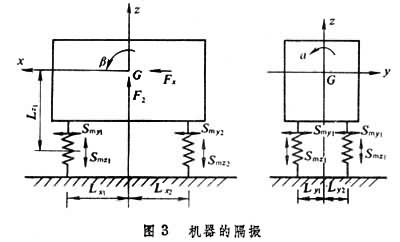
选用隔振器时应考虑到具体的隔振要求、环境条件、机器的动态特性等因素。 隔振器有橡胶隔振器(用天然橡胶、氯丁橡胶、硅橡胶、丁基橡胶、丁腈橡胶等制作),金属弹簧隔振器(圈形、板形等),空气垫隔振器,金属网隔振器,还有其他材料制作的隔振器,例如软木、毡、海绵橡胶等。金属弹簧隔振器适用于承载大形变的场合(在不超过弹簧材料的安全应力限度内),这种隔振器的优点是对环境的适应性较强,可在宽的温度范围内工作;缺点是无隔声作用。橡胶隔振器可有不同的结构形式,这主要是由橡胶的不同承载方式所决定的。例如,有压缩型、剪切型、弯曲型等。橡胶隔振器的力劲与橡胶的成分、硫化的方法及构件的形状及尺寸有关。
|
 ,
, =1时为共振状态;
=1时为共振状态; 时传递力比外力还要大;
时传递力比外力还要大; =
= 时传递力等于外力;
时传递力等于外力; >
> 时传递力小于外力。另外,
时传递力小于外力。另外, >
> 时,增大系统的阻尼将会产生不利的作用,在此频段内, 阻尼愈大,传递比TA也愈大,从而隔振器的隔振效果变差。通常为了隔振,起码要求
时,增大系统的阻尼将会产生不利的作用,在此频段内, 阻尼愈大,传递比TA也愈大,从而隔振器的隔振效果变差。通常为了隔振,起码要求 >2.5,为了达到更好的隔振效果,要求
>2.5,为了达到更好的隔振效果,要求 ,
, 见图3。当满足下面的条件:
见图3。当满足下面的条件:


















