
有限元法
|
[拼音]:youxianyuanfa [外文]:finite element method 对机械零件或构件等作应力分析的一种离散数值方法。它把求解的区域分成若干相互联接的子区域,这些子区域称为有限单元。求解时,以节点待定函数值作为基本未知量,建立单元内各待定函数与节点值间的关系。节点值可以是力、位移或温度等参数。求解过程的实质是把在整个区域上求连续函数的问题,离散为求解包含有限个节点处待定值的代数方程组。单元分得越小,结果就越接近于正确的连续解,这时将得到数百个甚至成千上万个代数方程式,利用电子计算机求解。有限元法能用不同形状、大小和类型的单元(图1)来模拟任意几何形状的结构,能适应任意支承、载荷条件和各种复杂的材料性质,并可编制成各种通用程序,在计算机上进行计算。 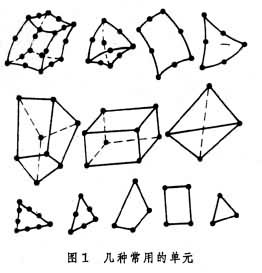 简史
简史
B.朗吉佛斯于1952年、J.H.阿吉里斯于1955年把杆、梁、柱等构件分为单元,用结构矩阵法进行杆系结构的分析。1956年,M.J.特纳、R.W.克拉夫、H.C.马丁和L.J.托普把复杂结构和连续体分为许多三角形和矩形单元,成功地分析了飞机的结构。电子计算机的发展提供了可靠的计算工具,使有限元法得到应用和迅速发展。70年代,有限元法在材料非线性和几何非线性、断裂力学、流体力学、生物力学、渗流分析、污染扩散和建筑声学等方面都取得了研究成果。一种新发展的边界元法,降低了问题的维数,便于在微型计算机上推广,计算精度较高,故在求解无限域、应力集中和有关断裂力学等方面的问题中得到发展。 方法有限元法的分析过程是将连续体离散为许多单元,用单元的组合体代替原来的连续体以满足几何上的近似。在应力变化较复杂的部位,单元可以分得小一些,例如对管接头作有限元法的应力分析时,由于接头的过渡处存在应力集中,把这部分的单元分得比较小(图2)。在进行结构应力分析时,如果是以节点位移作为基本未知量进行求解,则要求各单元的变形能够模拟原连续体中对应区域的实际变形,为此要求有合适的单元位移函数。位移函数是对单元内位移状态的一种假定,根据位移函数,单元内各点的位移可以由单元节点位移通过插值求得。如果位移函数能使位移在单元内和在相邻单元的公共边上都能连续,则单元尺寸分得越小时,有限元法的解就能收敛于真实解。 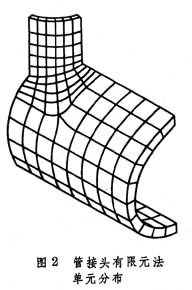
通过位移函数建立了单元内任意一点的位移与节点位移间的关系之后,进一步是建立单元节点力与单元节点位移间的关系。各种单元的节点数并不相同,少则几个,多则几十个。用{δ}表示单元节点位移的集合;与之相对应,用{R}表示单元节点力的集合,二者的关系是 
式中[k]是单元刚度矩阵,它是由一些刚度系数按一定规律排列成的数表。每个刚度系数表示在某处产生单元位移需要在该处或他处所要加的力的大小。将各个单元按照单元结点编号的位置组集起来,就可得到整个结构。如以{P}和{ 
根据已知的边界条件,对上式进行必要的修改,可解得{ 从数学上看,有限元法是把求解无限自由度的待定函数变为求解有限个自由度的待定值问题。 程序用电子计算机语言编制的解题过程称为程序。程序可贮存在电子计算机中,解题时只要将必要的数据输入计算机,即可得到所要求的结果。 结构分析程序可针对某类课题编制成专用的或通用的大型程序。程序中各种形状和类型的单元,分别适应各种复杂的几何图形、受力、约束和材料特性。在计算机上可绘出结构受力前后的几何图形、应力轮廓图形和响应图形。结构分析程序使有限元法的分析过程系统化、通用化和自动化。程序中广泛采用模块式设计,整个程序由许多独立的模块(子程序)组合而成,替换或增加子程序可使程序具有改进和扩充的功能。 程序应该使用方便,有良好的文件编制,有子结构能力,能进行多工况分析,具有式样众多的后处理程序。
|
 }分别表示结构节点的载荷和节点位移的集合,[K]表示结构总刚度矩阵,则
}分别表示结构节点的载荷和节点位移的集合,[K]表示结构总刚度矩阵,则 },单元的节点位移和结构的节点位移在同一点处是相等的。有了节点位移,可通过插值求单元内的位移,利用弹性力学公式根据位移可算出单元中的应变和应力等参数。将以上分析的全过程用计算机语言编制成程序,连同结构的原始数据输入计算机,可算出所需要的结果。
},单元的节点位移和结构的节点位移在同一点处是相等的。有了节点位移,可通过插值求单元内的位移,利用弹性力学公式根据位移可算出单元中的应变和应力等参数。将以上分析的全过程用计算机语言编制成程序,连同结构的原始数据输入计算机,可算出所需要的结果。

















